本实验代码可以通过面包多购买或者关注公众号免费获取。扫码关注回复“模糊汽车”即可获取全部内容!
一、实验目的
理解模糊逻辑推理的原理及特点,熟练应用模糊推理,了解可能性理论。
模糊推理所处理的事物自身是模糊的,概念本身没有明确的外延,一个对象是否符合这个概念难以明确地确定,模糊推理是对这种不确定性,即模糊性的表示与处理。模糊逻辑推理是基于模糊性知识(模糊规则的一种近似推理,一般采用Zadeh 提出的语言变量、语言值、模糊集和模糊关系合成的方法进行推理。
二、实验内容
假设两汽车均为理想状态,即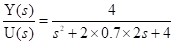 ,Y为速度,U为油门控制输入。
,Y为速度,U为油门控制输入。
(1)设计模糊控制器控制汽车由静止启动,追赶200m外时速90km的汽车并与其保持30m的距离。
(2)在25时刻前车速度改为时速110km时,仍与其保持30m距离。
(3)在35时刻前车速度改为时速70km时,仍与其保持30m距离。
要求:
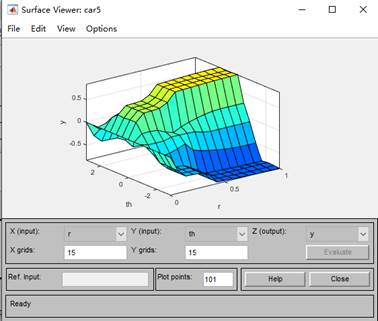
(1)设计两输入一输出的模糊控制器,给出输入、输出语言变量的隶属函数图,模糊控制规则表,推论结果立体图。
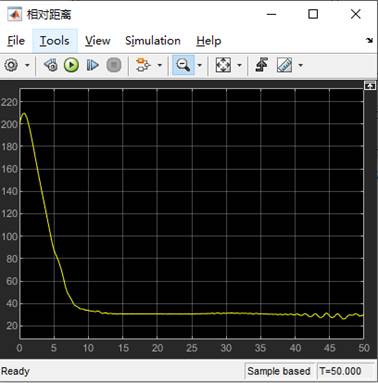
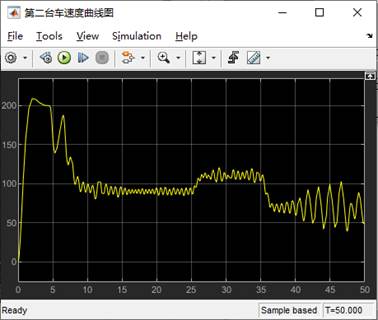
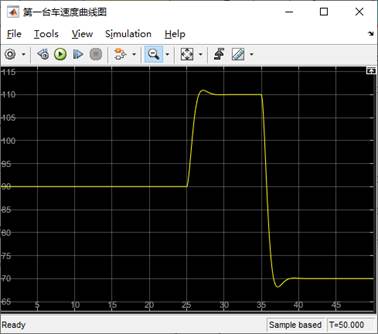
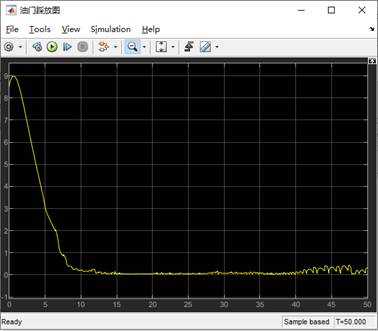
(2)用SIMULINK仿真两车追赶的模糊控制系统,给出目标车的速度曲线图、油门踩放图、追赶车速度图、与前车相对距离图。
三、实验结果
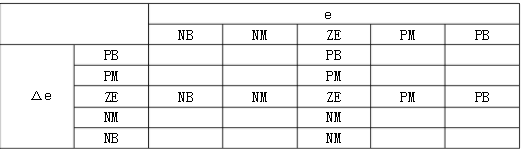
以误差量(两车距离〉及误差对时间的变化量作为输入进行模糊规则设计。本例采用位置型模糊控制器,即控制规则的条件为:
if v为A and th为B then y为C
按一般方法,可得一套控制规律[]如表1所示。
所示规则库有空缺,为了防止失控,可以将(e,△e)按如下公式转换为极坐标(r,θ)
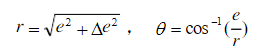
将规则库填满,从而得到表2所示极坐标形式的模糊控制规则:
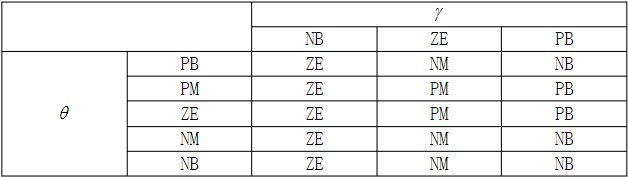
由上表可知,将θ分为PB PM ZE NM NB,将r分为NB ZE PB,y分为PB PM ZE NM NB。
因此可以根据此表一一写出对应规则如:
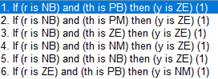
等15条规则。
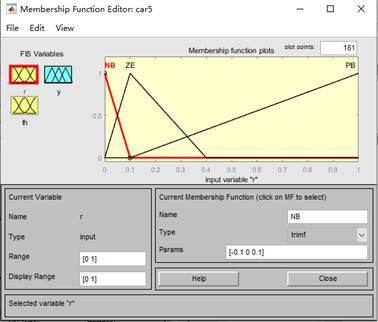
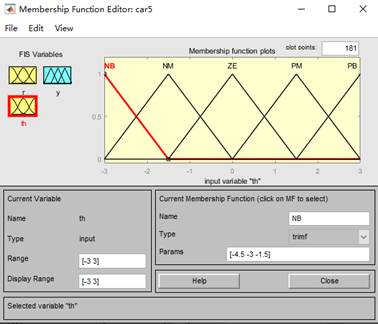
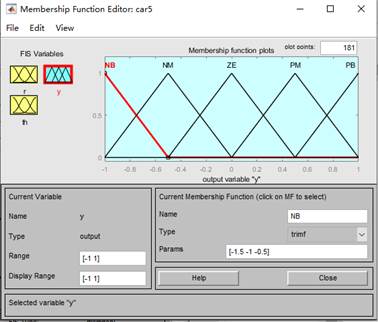
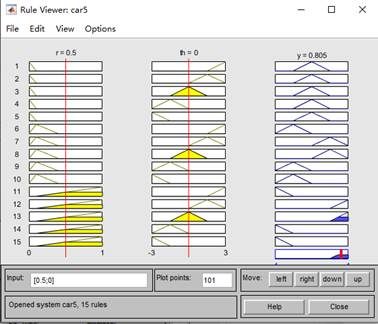
由MATLAB命令行输入fuzzy,配置模糊系统,设置输入r、th(θ)、输出y的论域分别为[0,1]、[-3,3]和[-1,1],并设置隶属函数(均取三角形)如下:
将建立好的FLS模糊推理系统car5.fis放入工作区,并导入设计好的SIMULINK仿真追赶模型如下:
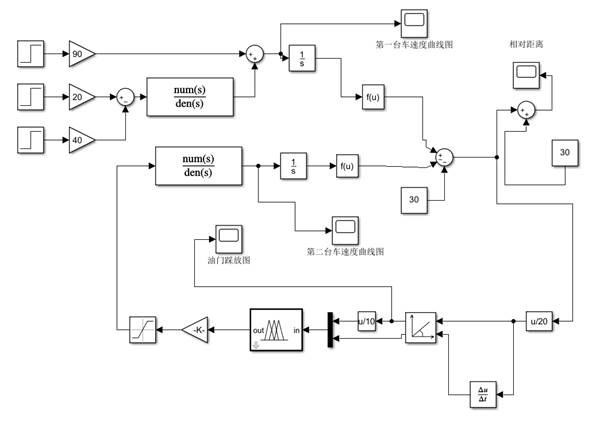
运行程序输出如下:
四、实验总结
由本次实验可知,隶属度,模糊关系,模糊规则的关系如下:
模糊规则,本质是定义在X x Y的二元模糊关系R。模糊规则的形式为:if x is A then y is B。
模糊关系R是X×Y中的模糊子集。若用μR(u,v)表示其隶属函数,则μR(u,v)反映了u与v有关系R的程度。
本实验达成了要求,并使我学到了很多知识,包括FIS模糊程序的建立,SIMULINK模型的搭建。更主要的是通过这次实验使我更加深刻地理解了这门课程的重要性。
使我学到了很多知识,包括FIS模糊程序的建立,SIMULINK模型的搭建。更主要的是通过这次实验使我更加深刻地理解了这门课程的重要性。
本实验代码可以通过面包多购买或者关注公众号免费获取。扫码关注回复“模糊汽车”即可获取全部内容!



- 本文链接:https://www.tjzzz.com/posts/6815b258.html
- 版权声明:本博客所有文章除特别声明外,均默认采用 许可协议。